Personal Portfolio
Test & Reliability Engineer Intern @ Gecko Robotics:
Solar Radiation Testing Station & Environmental Testing
Summary:
During my internship at Gecko Robotics, I worked on a critical project to develop an in-house solar radiation testing system compliant with MIL-STD-810H standards. The objective was to expand the capabilities of our existing environmental chamber by integrating solar radiation simulation to test the durability and performance of our robotic systems, particularly for deployments in harsh environments like the UAE.
Key responsibilities included:
System Design & Optimization: Evaluated and optimized the spatial configuration of the test chamber, ensuring the incorporation of a collapsible solar radiation setup that maximized space efficiency without compromising functionality.
Solar Array Integration: worked on procuring and installing a solar array capable of simulating realistic solar radiation conditions, crucial for testing robots under intense sunlight exposure.
Data Collection & Control Systems: Implemented a solar radiation control system that integrated with existing temperature and humidity controls. I ensured that all environmental data (solar radiation, temperature, and humidity) were accurately logged for analysis and reporting.
This project allowed Gecko to conduct solar radiation testing in-house, accelerating the testing pace, reducing costs, and ensuring the reliability of our robotic systems under extreme environmental conditions


SRTS Designed
The Solar Radiation Testing Station with radiation intensity control and integrated UI

Mockup SRTS Test
Solar Radiation Test conducted on power module for project design validation

SRTS Architecture
The solar radiation testing station design architecture


Thermal Testing
Thermal Chamber used in thermal tests such as thermal shock, high temp, cold temp for multiple test unit

Feasibility Study
Lamp Radiation Intensity distribution test conducted for radiation source trade study

Aluminum Extrusion Design
Fixture/Structure designed for a test station
Mechanical Engineer Intern @ Entergy:
Interface Development for Penetration Leakage Test Scoping
Summary:
Developed a user-friendly Excel interface utilizing VBA that links to our company's database via queries. This innovative interface offers comprehensive data on each penetration/component, including crucial information such as plant location, allowable maximum leakage, work orders, leak test history, failures, and regulatory deadlines. One of the notable strengths of this tool is its versatility, as it empowers users to access and utilize the provided data in multiple formats such as informative graphs, generated reports.

Manufacturing Engineer Intern @ GEA:
Warehouse Layout & Design
Motivation:
• Free Space Availability due to Production Line Shutdown
• Plant Material Flow Ineffeciency
Description:
Warehouse designed using AutoCAD to hold 189 parts doubled stacked. Prioritized maximizing storage space, ensuring forklift maneuverability, and strategically placing columns. The constraints included integrating existing infrastructures, such as charging stations and electric panels, and implementing a two-way traffic system to enhance efficiency and productivity in material handling.

Process Development for Enhanced Decision Making in Material Flow
Background:
Plant Material Flow Optimization Action plan involved the development of a new process aimed at mitigating issues related to excessive material handling, inventory system errors, and material planning.
Characterstics:
• Hot parts Automatic identification after the arrival of new components at the receiving area.
• Materials Digital Tracking enhancing visibility and production flow control
• Technical Reports Generation providing insights into flow contraints.
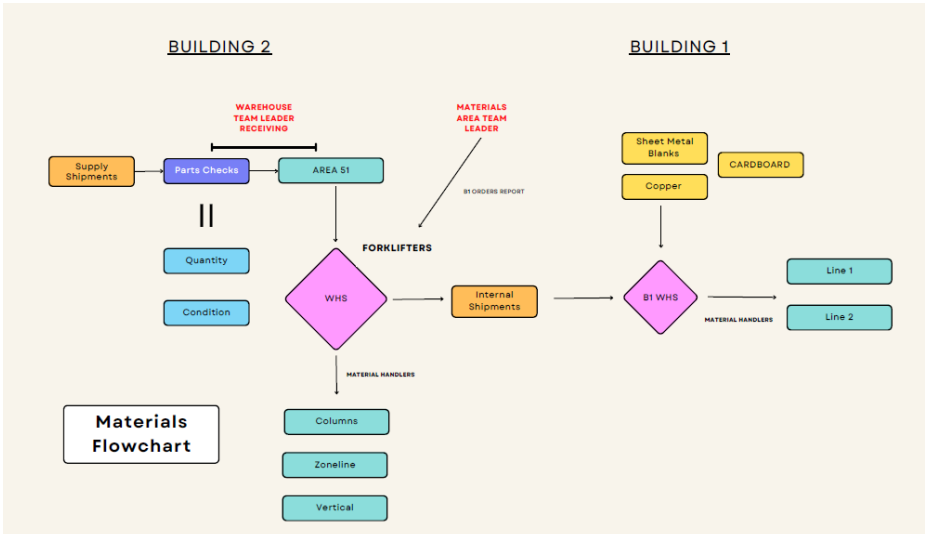
Examples of Report Generated:


MSU EcoCar Mobility Challenge
Dynamometer Vehicle Testing
Background:
Started contributing to the team during their third competition year, which was a pivotal phase in the project. The focus of the 3rd year was centered around extensive testing of the control strategy that had been meticulously designed in the preceding years. Through the application of dynamometer vehicle testing, we aimed to thoroughly evaluate the real-world effectiveness of our control strategy.
Description:
In my role, I contributed to the evaluation of the performance of our power distribution system by employing dynamometer vehicle testing. This technical approach involves the utilization of dynamometers to assess the powertrain and electrical systems of our vehicles under various operational scenarios (City Driving). Through the numerous test, evaluated:
• Power Output
• Voltage Regulation
• Response to load changes
• PDS Behavior during transient states
• Voltage and Power supply maintenance


Photo of the testing facility used in Center of Advanced Vehicular Systems Center at Mississippi State University
EV Powertrain Architecture Selection (New Ecocar EV Challenge)
Description:
Conducted performance modeling and analysis to compare two distinct powertrain architectures for our upcoming competition. To achieve this, I employed a rigorous set of performance metrics, primarily focusing on acceleration, energy consumption, and range. This comprehensive evaluation allowed us to quantify the trade-offs between the two powertrain architectures and make informed decisions.



Competition Vehicle Lyriq 2023 provided to MSU Team
Space Cowboys Rocket Team
Two Stage Supersonic Rocket Conceptual Design

Performance Simulation
Description:
Employed the system engineering tool OpenRocket for simulating the flight profile and assessing vehicle stability, considering factors such as the airframe's geometry, mass, and material composition, as well as the flight computer's timing and the thrust profile generated by the motors.


Parts CAD Modeling
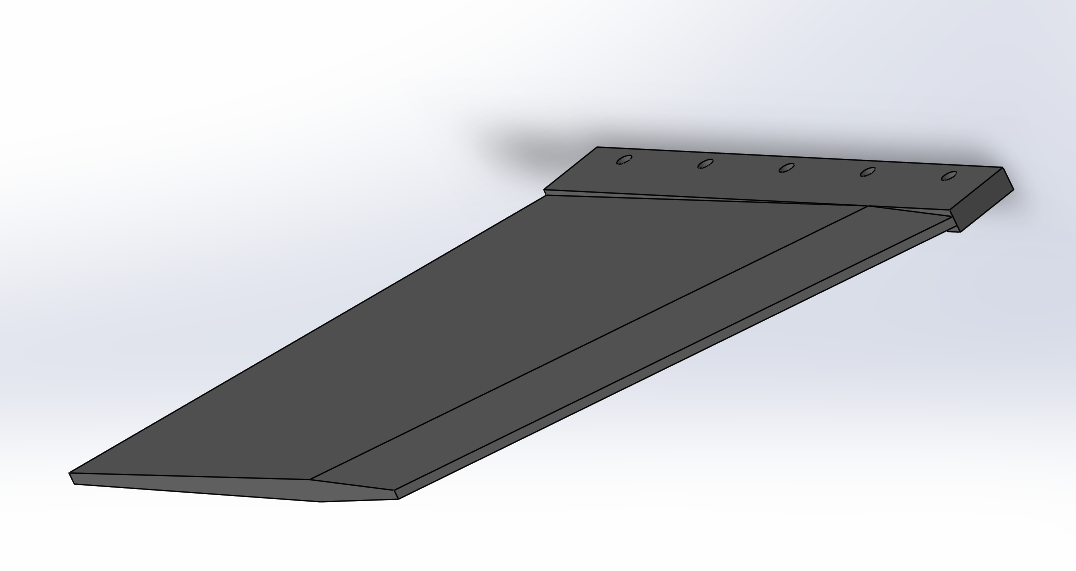
Fins Mounting Bracket
6061 T6 Bracket providing a secure attachment point for the rocket's fins, which helps maintain proper orientation and stability as the rocket ascends
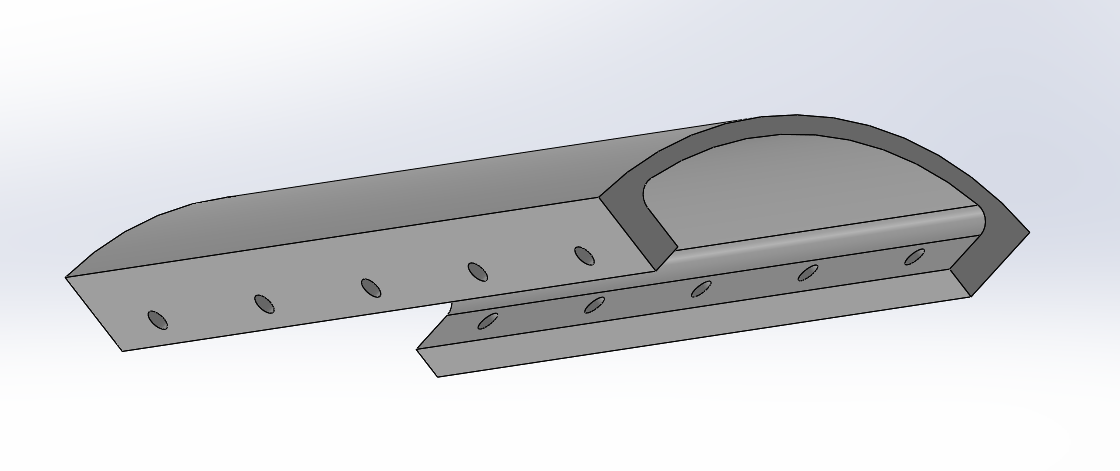
Rocket Fins
Rocket fins ensure stability during flight by controlling aerodynamic forces. The "diamond wedge airfoil" is a streamlined fin design that enhances lift and stability

Vehicle Suspension Model Verification & Validation - Honors Thesis
Summary:
During my honors thesis, I focused on developing a systematic approach to vehicle suspension modeling, specifically targeting the verification and validation (V&V) of suspension system simulations. The project was based on a case study of an RC vehicle suspension system, where I conducted both physical drop testing and simulations using the Mississippi State Autonomous Vehicle Simulator (MAVS) platform.
Key contributions included:
Physical Testing & Data Collection: I conducted drop tests in a controlled lab environment, capturing high-speed footage of the vehicle's motion. I used image processing techniques to analyze the data, including displacement, velocity, and oscillation patterns, which enabled the identification of critical suspension parameters like spring constants and damping coefficients.
Simulation & Modeling: I implemented the identified parameters into the MAVS platform, recreating the experimental setup in a virtual environment. By simulating the drop tests, I evaluated the fidelity of the MAVS simulation compared to real-world data.
Verification & Validation (V&V): I compared the MAVS simulation results with experimental data, quantifying the differences using error metrics like Mean Squared Error (MSE). This allowed me to refine the simulation model, ensuring it accurately represented the suspension system's physical behavior.
This project highlights the importance of using real-world experimental data to validate simulation models, providing a framework for improving vehicle development processes by ensuring simulations accurately predict real-world performance


Resilience Quantification of Space Habitats
Published in International Conference of Environmental Systems
Summary:
During my work on a space habitat resilience project, I utilized the Modular Coupled Virtual Testbed (MCVT) to model and simulate the impact of various disruptive events on a habitat's power system. The project aimed to quantify the resilience of space habitats, particularly under extreme conditions such as micrometeorite collisions.
Key contributions included:
Simulation Setup: I implemented simulation scenarios within MCVT to assess the resilience of the power system. One notable scenario involved a micrometeorite impact that disrupted power converters and battery cells, allowing me to examine system recovery efforts and performance.
Network Resilience Analysis: I modeled the power system as a network comprising 13 nodes, with critical components represented as nodes and dependencies modeled as edges. I analyzed network resilience using centrality metrics such as betweenness, harmonic, and load centralities to assess the influence and importance of individual nodes.
Resilience Metrics: I computed four key resilience metrics—robustness, vulnerability, recoverability, and consolidation—based on system performance during the simulated disruptions. These metrics provided insights into the system's ability to maintain core functionality, recover from failures, and enhance stability post-disruption.
Data-Driven Results: The simulations provided critical data on system performance, allowing me to propose improvements, such as implementing redundant systems and establishing standardized protocols to minimize the impact of future disruptions.
This project emphasized the importance of network-centric approaches and performance-based analysis in improving the resilience of space habitats

MSU URS
A Snapshot from my participation in the Undergraduate Research Symposium, where I had the opportunity to present my research



Autonomous Systems Research Project
Summary:
Currently investigating the relationship between vehicle powertrain output and the roughness of various terrains. The goal of this investigation is to shed light on the impact of the terrain on fuel efficiency. The initial assumption in research related to autonomous systems that the absence of human drivers eliminates concerns about passenger discomfort. However, as the industry focuses more on fuel efficiency and sustainability, investigating the output vs roughness relationship is important.
My research employs MAVS (Mississippi State Autonomous Vehicle Simulator), a software library that enables real-time evaluation of autonomous perception and navigation software for off-road vehicles. MAVS supports high-performance computing, concurrent simulations, and physics-based sensor modeling, including LIDAR, GPS, and cameras.

Initial Phase Research Data Results